Jaloezie met servo aansturing
Ik was al een tijdje van plan om mijn jaloezie met een servo open en dicht te doen.
Nu is het er eindelijk van gekomen.
Voor de aansturing gebruik ik een NodeMcu ESP2286 development board.
En de servo is een DS3120MG 270 graden versie.
Zo werkt de aansturing:
[embedyt] https://www.youtube.com/watch?v=MyGcaHzhDao[/embedyt]
En zo is de servo aangesloten op de jaloezie as:


De software is geschreven in Arduno IDE.
Vul dit formulier in als u geïnteresseerd bent:
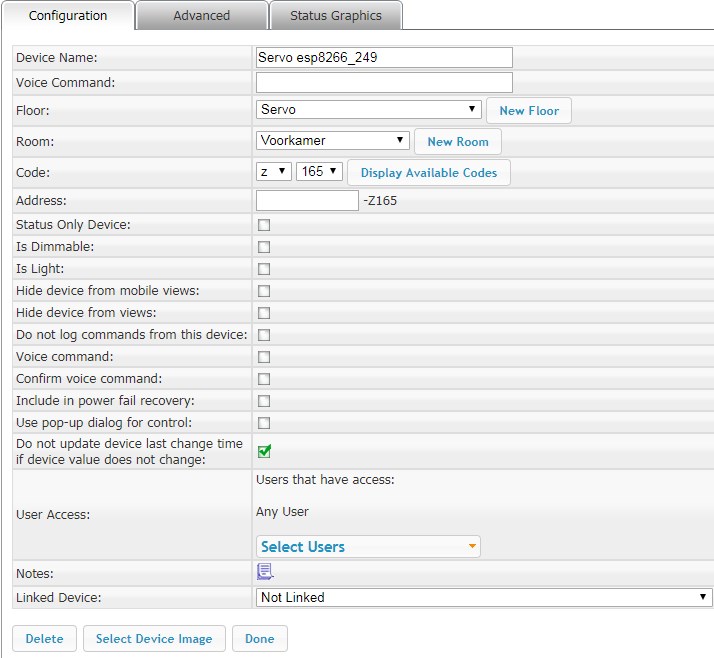
In Homeseer heb ik een dimbaar device aangemaakt voor de servo.
In events een event dat start als het device van waarde verandert:
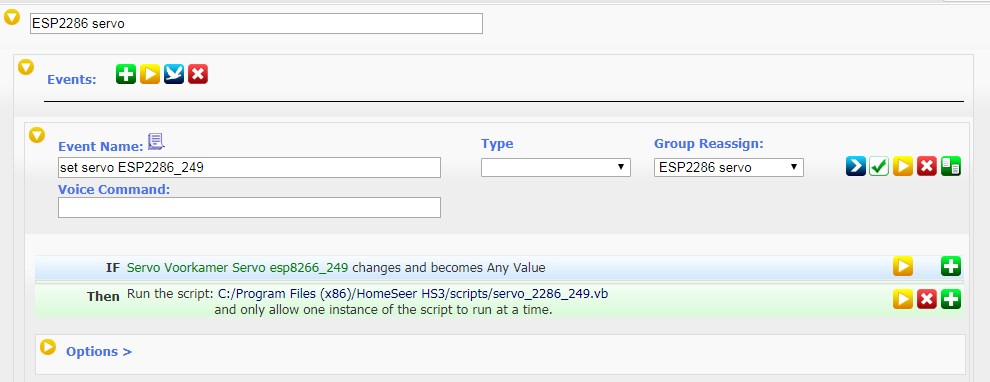
Dit event start een script:
Public Sub Main(parms As Object)
Dim debug = 1
Dim P_url = “192.168.86.249”
Dim P_page = “/Blind?Angle=”
Dim Is_page
Dim z165 = hs.getdeviceref(“z165”)
Dim waarde = hs.devicevalue(z165)
If debug = 1 Then hs.writelog(“servo_2286”, waarde)
Is_page = hs.GetURL(P_URL, P_page & waarde, False, 80)
If debug = 1 Then hs.writelog(“servo_2286”, Is_page)
End Sub
De URL is de URL van de NodeMCU
Vul het formulier in als u geïnteresseerd bent.
z165 is de code voor het device:
Als het device van waarde verandert start het event die weer het script start en het script stuurt het commando naar de NodeMCU die vervolgens de servo in de juiste stand zet.
De servo is ook vanuit een webpagina aan te sturen.
Uitleg hierover staat op de homepage van de NodeMCU.
De LED op de NodeMCU knippert langzaam als de software draai.
En snel als de servo draait.
Het je vragen, laat dan een reactie achter.
![]()