Automatische Jaloezie Aansturing
DIY Automatische Jaloezie Aansturing met ESP32, Steppermotor en 3D‑Geprinte Behuizing
Wil je je houten jaloezieën automatiseren zonder dure commerciële systemen?
In dit project bouwen we een volledig lokaal werkende jaloezie‑controller met:
- een ESP32
- een 28BYJ‑48 steppermotor
- een ULN2003 driver
- micro‑switches
- een 3D‑geprinte behuizing
- ESPHome + Home Assistant
Hieronder vind je alle onderdelen, de montage, foto’s van het project, schema’s en de volledige ESPHome‑YAML.
Benodigde onderdelen
Mechanisch
- 28BYJ‑48 5V steppermotor + ULN2003 driverboard
AliExpress link - Kantelmechanisme voor 50 mm of 38 mm houten jaloezieën
AliExpress link - 3D‑geprinte behuizing voor motor + elektronica
Download op MakerWorld
Elektronica
- LIVE D1 mini ESP32
AliExpress link - Micro switch 3‑pin met roller
AliExpress link
Fotoreportage van het project
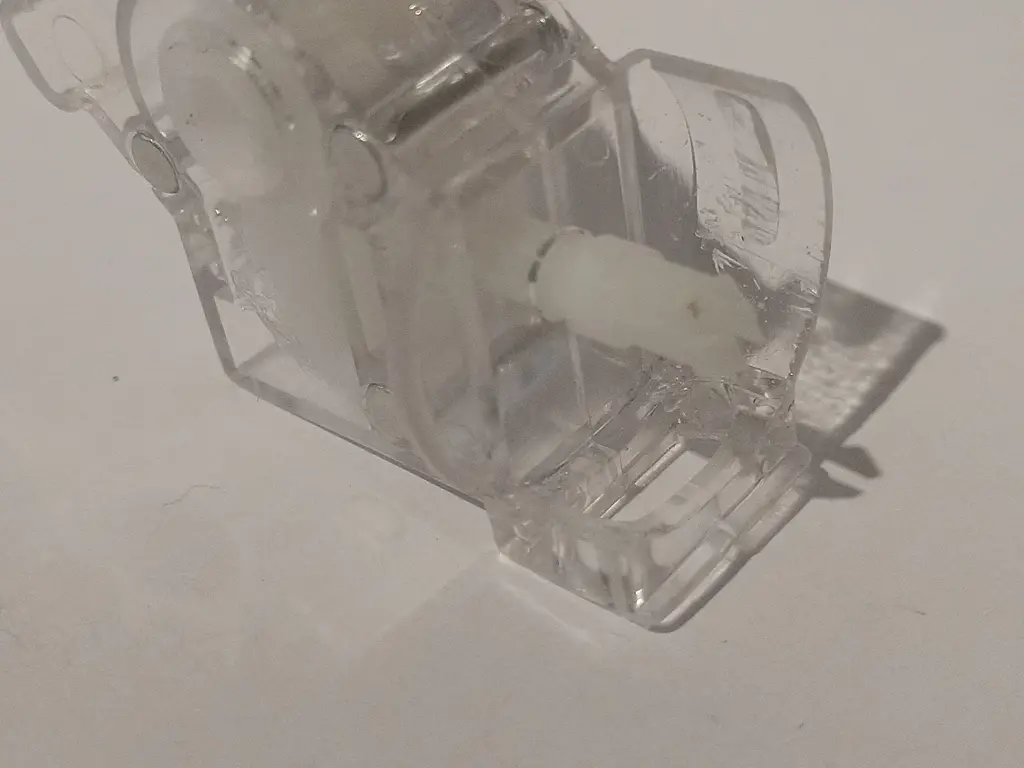
Foto 1 – Tandwielmechanisme
Close‑up van het interne tandwiel van het jaloeziemechanisme. Dit is het deel waar de motor op aangrijpt.
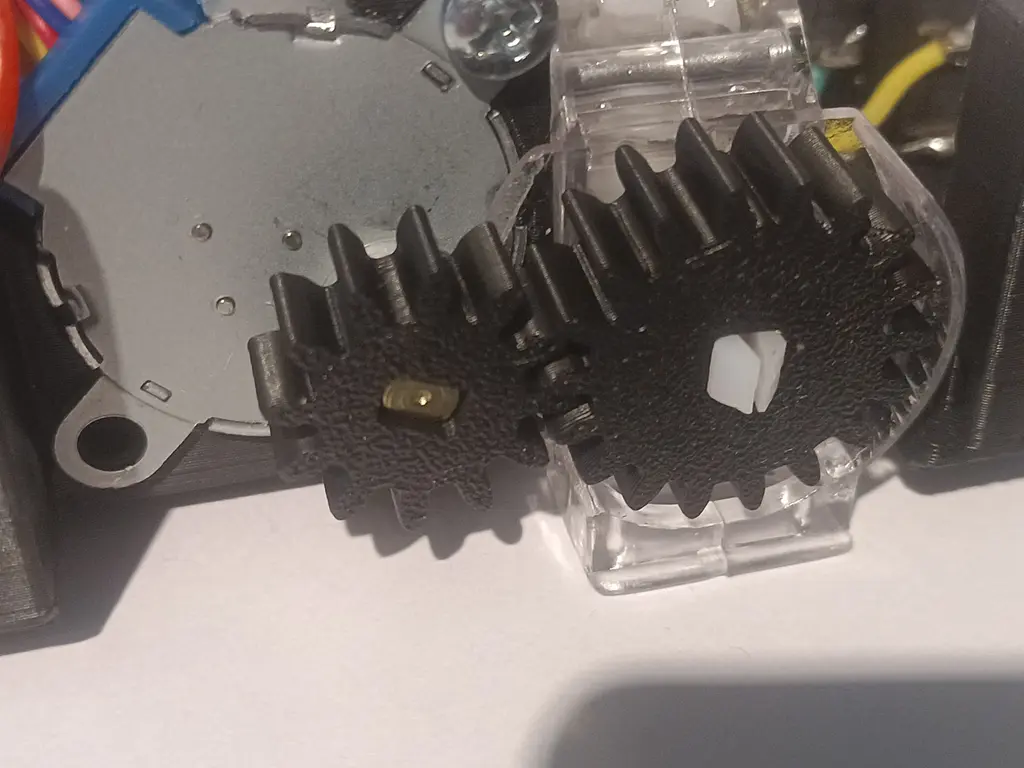
Foto 2 – Steppermotor + tandwieloverbrenging
De 28BYJ‑48 motor gekoppeld aan het grote tandwiel van de jaloezie.
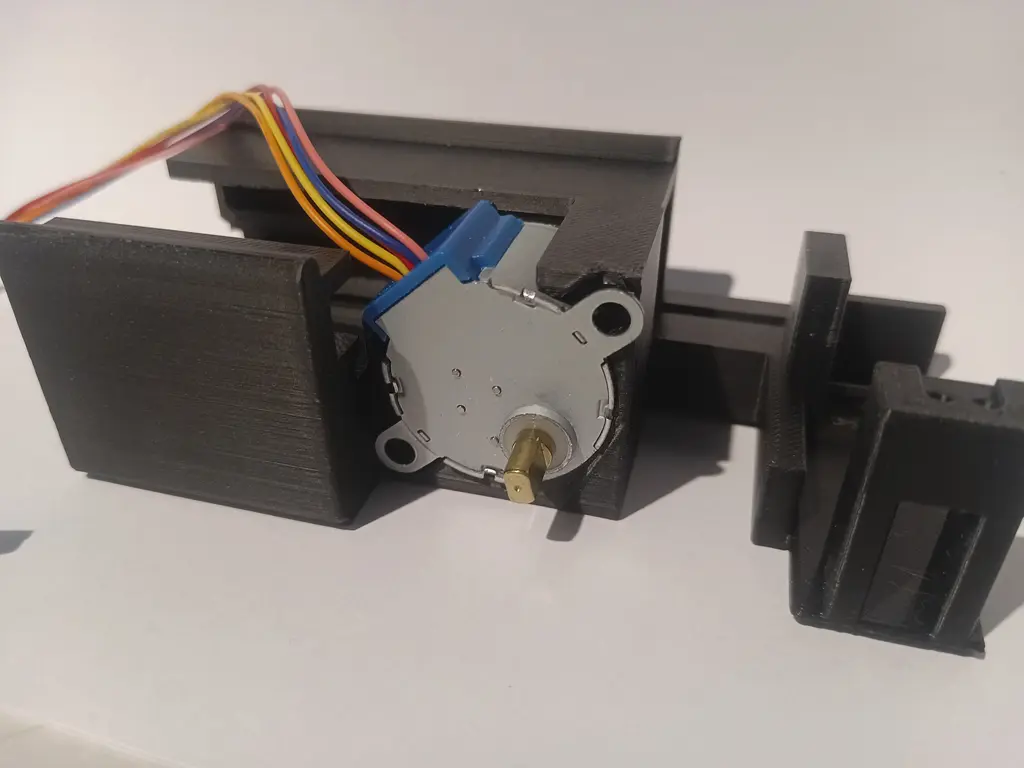
Foto 3 – Motor in montageframe
De motor zit stevig geklemd in de 3D‑geprinte houder.
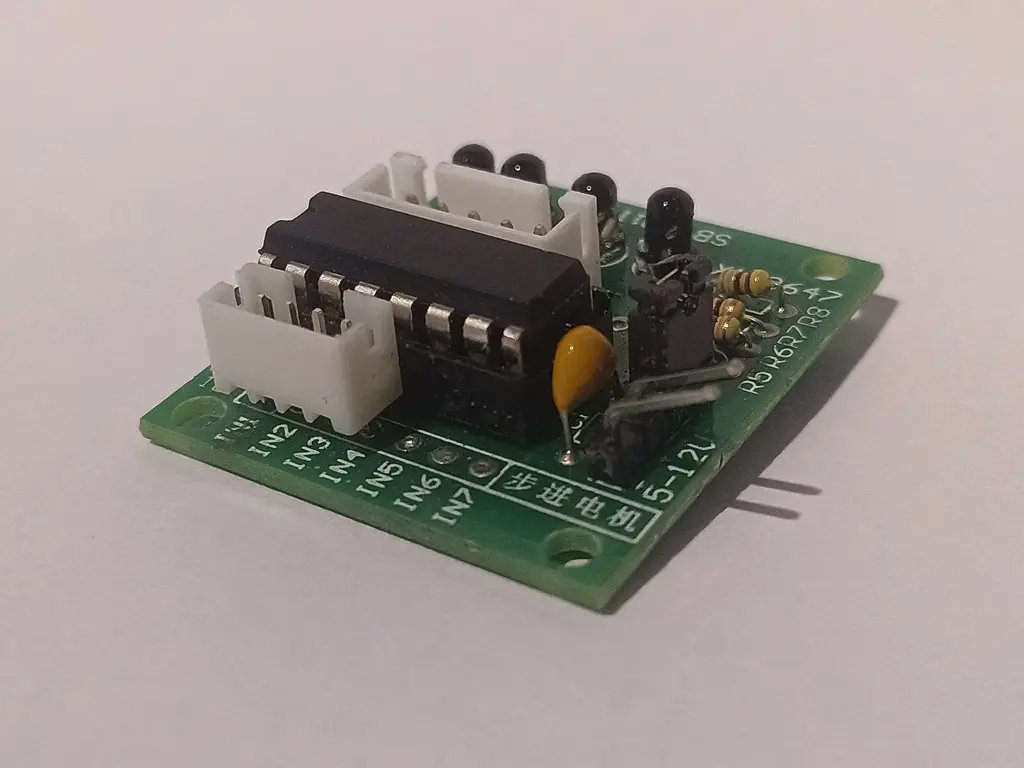
Foto 4 – ULN2003 driverboard
Het driverboard dat de steppermotor aanstuurt.
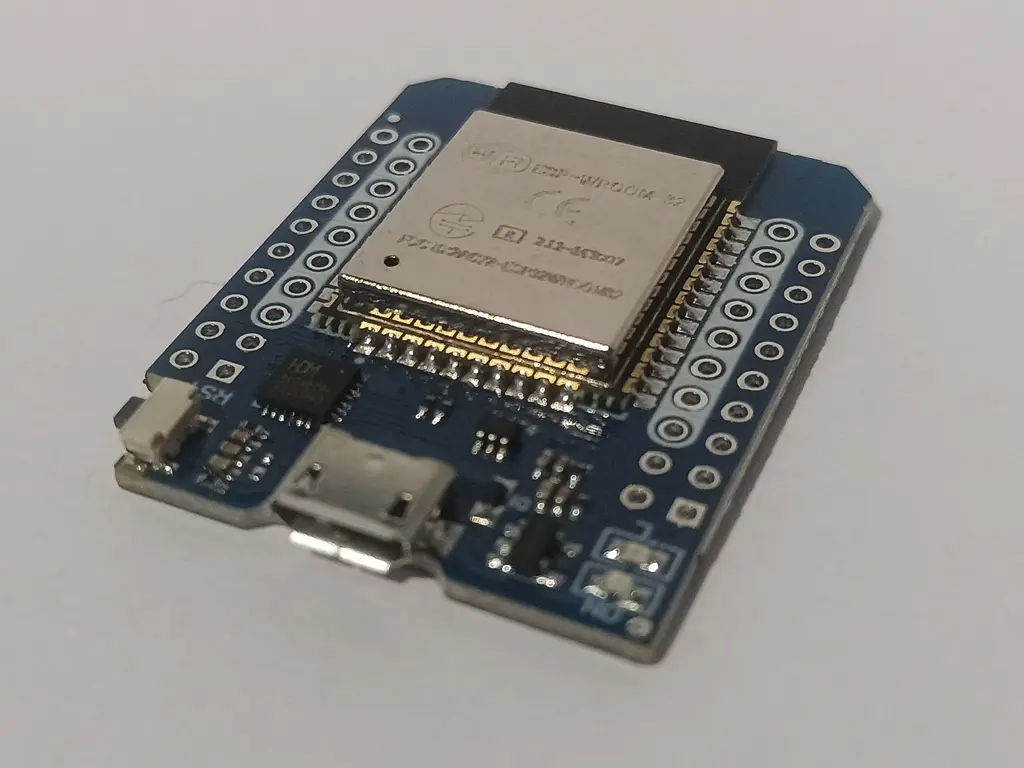
Foto 5 – ESP32 module
De compacte ESP32 D1 mini die in de behuizing past.

Foto 6 – ESP32 bedrading
De bedrading naar de ULN2003 driver.
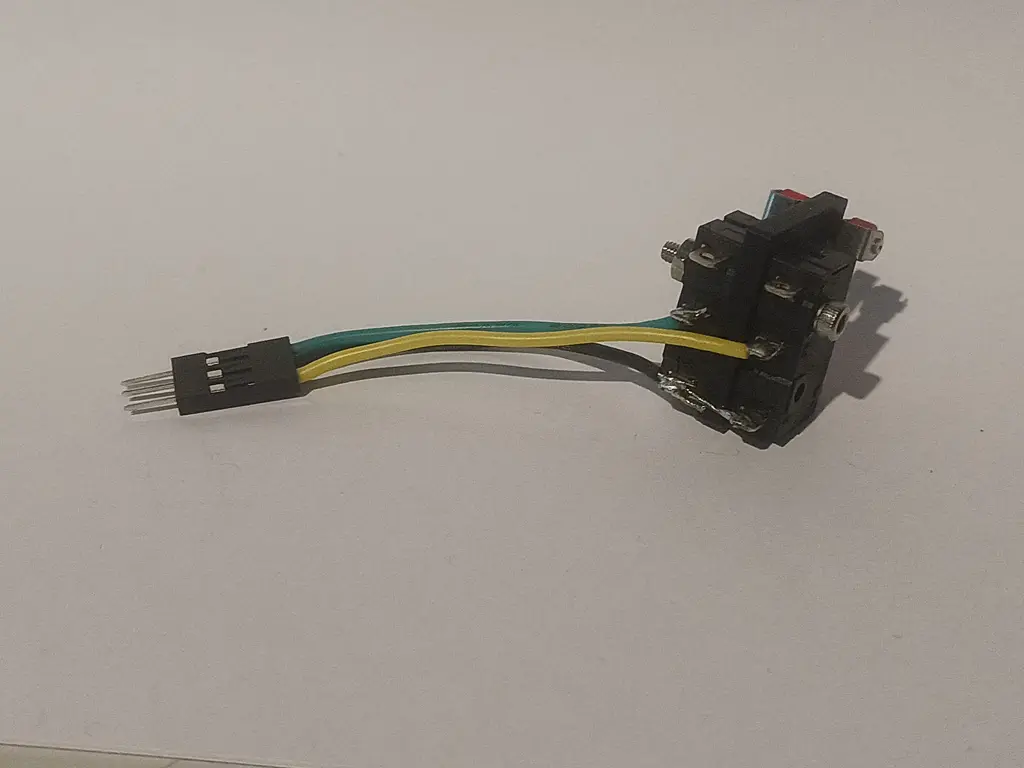
Foto 7 – Eindschakelaars
De micro‑switches voor handmatige bediening.
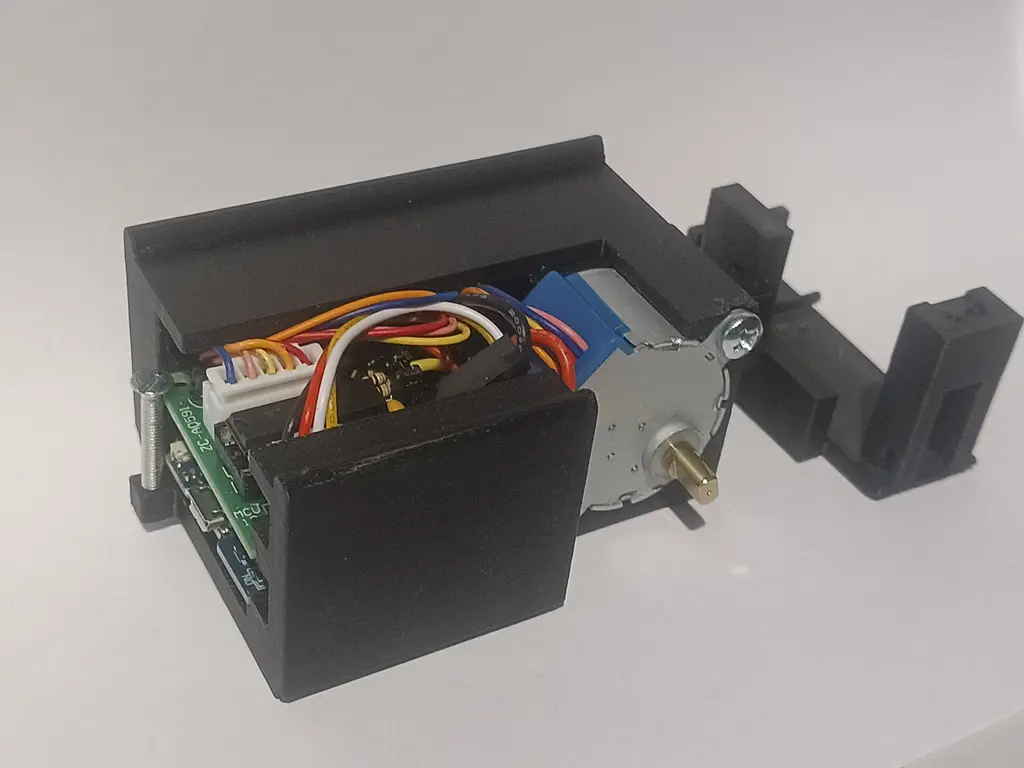
Foto 8 – Complete montage
Alle onderdelen gemonteerd in de 3D‑geprinte behuizing.
Elektrisch schema
[ESP32 D1 Mini] ├─ 5V ───────────────→ [ULN2003] VCC ├─ GND ───────────────→ [ULN2003] GND ├─ GPIO22 ────────────→ [ULN2003] IN1 ├─ GPIO21 ────────────→ [ULN2003] IN2 ├─ GPIO17 ────────────→ [ULN2003] IN3 └─ GPIO16 ────────────→ [ULN2003] IN4 [ULN2003] └─ Motor connector → 28BYJ‑48 Steppermotor [ESP32 D1 Mini] ├─ GPIO26 ───────────→ Micro‑switch CW (NO) └─ GPIO18 ───────────→ Micro‑switch CCW (NO) Micro‑switches: ├─ COM → GND └─ NO → GPIO (26 of 18)
Mechanisch schema
[3D-geprinte behuizing]
├─ Kamer 1: Steppermotor (28BYJ‑48)
│ └─ Motoras grijpt in het tandwiel van het jaloeziemechanisme
│
├─ Kamer 2: ULN2003 driverboard
│ └─ Motorstekker direct aangesloten
│
├─ Kamer 3: ESP32 D1 Mini
│ └─ JST-connector naar driverboard
│
└─ Zijkant: Micro-switch CW & CCW
├─ Roller raakt de handmatige bedieningshendel
└─ Functie: handmatige bediening (links/rechts)
Overzichtsschema
[ESP32 D1 Mini]
│
▼
[ULN2003 Driverboard]
│
▼
[28BYJ‑48 Steppermotor]
│
▼
[Jaloezie tandwielmechanisme]
Handmatige bediening:
[Micro-switch CW] ←─┐
[Micro-switch CCW] ←┘
Montage – stap voor stap
1. Print de behuizing
Alle onderdelen passen met support printen. PLA of PETG werkt prima.
2. Monteer de steppermotor
Schuif de motor in de houder en zorg dat het tandwiel goed grijpt.
3. Plaats de ULN2003 driver
Klik het board in de sleuf en verbind de motorstekker.
4. Monteer de ESP32
Verbind IN1–IN4 met de driver en sluit 5V + GND aan.
5. Monteer de micro‑switches
Deze worden gebruikt voor handmatige CW/CCW bediening.
6. Sluit alles aan
ESP32 → ULN2003 → motor → micro‑switches.
7. Upload de ESPHome firmware
Gebruik de YAML hieronder.
8. Automatische kalibratie
Bij elke reboot:
- motor draait naar open‑positie
- positie wordt op 0 gezet
- motor draait naar half‑positie
- positie wordt opnieuw op 0 gezet
ESPHome YAML (algemene versie)
# ============================================================
# JALOEZIE
# Inclusief:
# - Absolute kalibratie bij opstart
# - 10s stabilisatietijd
# - Half-target instelbaar in Home Assistant (persistent)
# - Realtime positie & percentage
# - Software eindstops
# - Handmatige bediening (vasthouden = draaien)
# - Versie 20260220.1
# ============================================================
substitutions:
name: stepper_blind
blindname: "blind"
friendly_name: "jaloezie"
stepperid: ${name}
calib_open_target: "36000"
calib_half_target: "-18000"
min_position: "-14000"
max_position: "14000"
esphome:
name: ${name}
friendly_name: "${friendly_name}"
on_boot:
priority: -10
then:
- delay: 10s
- lambda: |-
if (id(calib_half_target_global) == 0) {
id(calib_half_target_global) = ${calib_half_target};
}
- stepper.set_target:
id: $stepperid
target: ${calib_open_target}
- wait_until:
condition:
lambda: 'return id($stepperid).current_position == ${calib_open_target};'
- stepper.report_position:
id: $stepperid
position: 0
- stepper.set_target:
id: $stepperid
target: 0
- stepper.set_target:
id: $stepperid
target: !lambda return id(calib_half_target_global);
- wait_until:
condition:
lambda: 'return id($stepperid).current_position == id(calib_half_target_global);'
- stepper.report_position:
id: $stepperid
position: 0
- stepper.set_target:
id: $stepperid
target: 0
esp32:
board: esp32dev
framework:
type: esp-idf
globals:
- id: calib_half_target_global
type: int
restore_value: true
stepper:
- platform: uln2003
id: $stepperid
pin_a: GPIO22
pin_b: GPIO21
pin_c: GPIO17
pin_d: GPIO16
max_speed: 500 steps/s
sleep_when_done: true
cover:
- platform: template
name: $blindname
id: ${blindname}
has_position: true
device_class: blind
open_action:
- stepper.set_target:
id: $stepperid
target: ${max_position}
close_action:
- stepper.set_target:
id: $stepperid
target: ${min_position}
stop_action:
- stepper.set_target:
id: $stepperid
target: !lambda return id($stepperid).current_position;
# SET POSITION action verkeerd om
# position_action:
# - lambda: |-
# float target = (1.0 - pos) * (float(${max_position}) - float(${min_position})) + float(${min_position});
# id($stepperid).set_target((int)target);
position_action:
- lambda: |-
// percentage van HA → stepper positie (nu omgedraaid)
float target = pos * (float(${max_position}) - float(${min_position})) + float(${min_position});
id($stepperid).set_target((int)target);
# Cover slider in HA → 0–1.0
lambda: |-
float percent = id(position_percent).state;
return percent / 100.0;
sensor:
- platform: template
name: "$blindname Position"
id: position
accuracy_decimals: 0
update_interval: 200ms
lambda: |-
return (int) id($stepperid).current_position;
filters:
- delta: 10
- platform: template
name: "$blindname Percentage"
id: position_percent
unit_of_measurement: "%"
accuracy_decimals: 0
update_interval: 200ms
lambda: |-
float pos = id($stepperid).current_position;
return (int)((1.0 - ((pos - ${min_position}) / (float(${max_position}) - float(${min_position}))))) * 100.0;
filters:
- delta: 1.0
number:
- platform: template
name: "${blindname} Calib Half Target"
id: calib_half_target_number
min_value: -50000
max_value: 50000
step: 100
restore_value: true
on_value:
then:
- lambda: |-
id(calib_half_target_global) = (int)x;
wifi:
ssid: !secret wifi_ssid
password: !secret wifi_password
logger:
ota:
api:
Conclusie
Met deze 3D‑geprinte behuizing, goedkope componenten en ESPHome heb je een
professionele jaloezie‑automatisering die volledig lokaal werkt en perfect integreert met Home Assistant.
Is er iets niet duidelijk, laat het gerust weten.
![]()